Large and fragile object manipulation tasks are extensively performed by operators in industrial contexts, for instance in aerospace industry as well as in construction field. Our work in the project has been driven by VDL use-case, dealing with the manufacture of composite parts. The manufacturing process of such parts requires the transport of large and fragile components, like foam blocks, into a mold where they have to be precisely positioned. The manipulated object main features – large and fragile – lead to involve several operators working together for executing the task, and often cause ergonomics issues. Operators sometimes use industrial assisting systems, but these latter suffer from a lack of flexibility.
In this regard, large and fragile objects co-manipulation task has resulted in many research and development efforts in robotics field and in particular in the human-robot joint collaboration domain.
How to execute any trajectory in a human-robot collaborative mode while minimizing the stress applied to a fragile part by both partners, in order to avoid damaging it?
In the MERGING project, we propose a new collaborative robotic controller that fulfills the main requirements of co-transportation tasks of large and fragile parts, i.e. by executing any trajectory in a collaborative mode while minimizing the stress applied to the part by both partners in order to avoid damaging it. This is a necessary condition for such parts transportation. More especially, our controller prevents the robot from applying torques to the part, while maintaining a desired orientation of the part along the transport trajectory in order to follow the operator.
In the MERGING project, we designed a new robotic-assistant controller adapted to human-robot large and fragile parts transportation
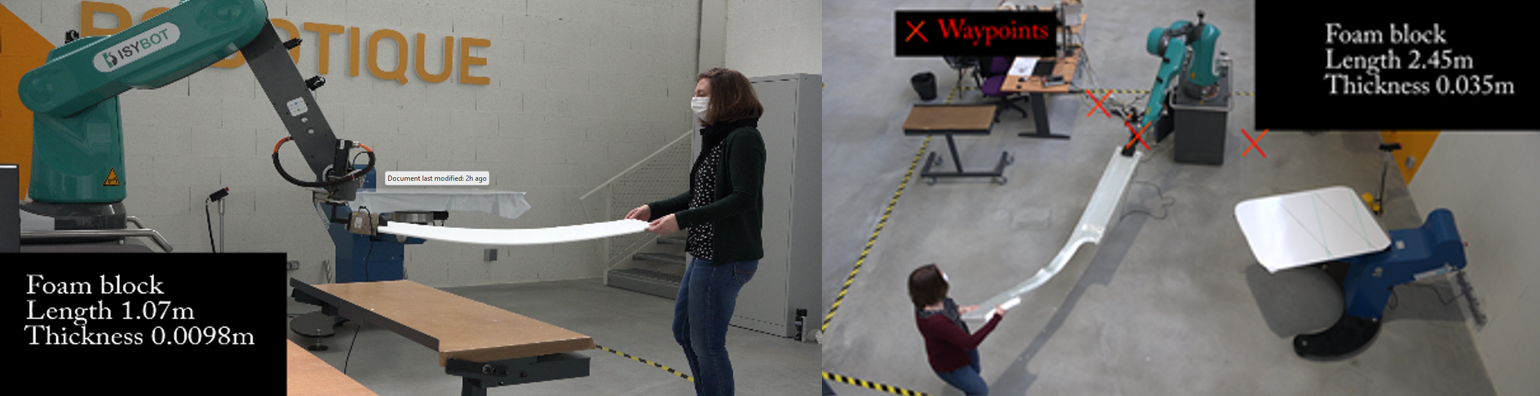
The robot actively moves along the transport path according to its wrist’s angle. This angle results from the operator action of transporting the part. The transport path is described by a virtual guide that allows joint human-robot transportation. We implemented this virtual guide with the virtual mechanism (VM) principle [JOLY 1995] (1).
We defined this VM as a combination of a) MDSplines [SANCHEZ 2017] (2) to define the path trajectory, and b) of a spherical joint in order to prevent robot from applying torques to the part and to use the wrist’s angle to follow the operator along the path.
Our contribution is an extension of the assistance proposed in [SANCHEZ 2017] (2) and of the wrist’s angle use introduced in [HAYASHIBARA 1999] (3) in order to transport a large fragile part on any kind of trajectory and not only straight lines.
We recently led a pilot experiment that highlighted both the efficiency and ease of use of our approach for the transportation of a large and fragile part. On the one hand, our controller prevents torques application at both robot and operator gripping points, which minimizes stress on the part. On the other hand, the non-roboticists operators pointed out the high intuitiveness of our active assistance, in comparison to the passive assistance proposed in [SANCHEZ 2020] (2).
This work led to:
• A scientific paper « Controller design of robotic assistant for the transport of large fragile part » presented at IROS 2022 International Conference
• A patent pending « Procédé de comanipulation d’une pièce par un opérateur aidé par un partenaire robotique »
(1) L. Joly and C. Andriot, “Imposing motion constraints to a force reflecting telerobot through real-time simulation of a virtual mechanism,” in IEEE International Conference on Robotics and Automation, vol. 1, 1995, pp. 357–362
(2) S. S´anchez Restrepo, G. Raiola, P. Chevalier, X. Lamy, and D. Sidobre, “Iterative virtual guides programming for human-robot comanipulation,” in IEEE International Conference on Advanced Intelligent Mechatronics (AIM), 2017, pp. 219–226
(3) Y. Hayashibara, T. Takubo, Y. Sonoda, H. Arai, and K. Tanie, “Assist system for carrying a long object with a human-analysis of a human cooperative behavior in the vertical direction,” in IEEE/RSJ International Conference on Intelligent Robots and Systems, vol. 2, 1999, pp. 695–700
Julie Dumora
Julie DUMORA is a robotics research engineer at CEA. She received the PhD degree in 2014 in the field of human robot interaction (HRI). Her research focuses on comanipulation of large parts by a dyad composed of a human and a robot. Her activities aim at simplifying the deployment and use of robotics in plants. Her expertise focus mainly on control field for HRI and on intuitive programming for non-experts in robotics.