A new scientific article by the LMS team in Merging, was published on CIRP Annals 2022.
Sotiris Makris, Emmanouil Kampourakis, Dionisis Andronas,
On deformable object handling: Model-based motion planning for human-robot co-manipulation, CIRP Annals, 2022,
https://doi.org/10.1016/j.cirp.2022.04.048.
Abstract
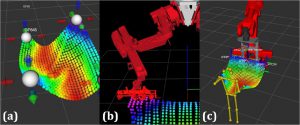
Despite extensive automation in multiple industrial sectors, manufacturing operations involving deformable objects are mostly performed manually. Challenges originating from flexible objects’ dynamic distortion underline handicaps in robot cognition and dexterity. This paper presents a model-based motion planner for deformable object co-manipulation. The developed closed-loop controlling framework interprets manipulation inputs into appropriate handling actions by simulating fabric’s distortion through a mass-spring model. The planner incorporates tools for rapid system commissioning and reconfiguration, grasping point planning, and monitoring of human actions. Inspired by automotive composite industry, two experimental setups are used for validating the system’s performance during translational and rotational co-manipulation.