
Modern manufacturing lines need to be more flexible and flexible systems require more complex orchestration strategies
Smaller product lifecycles require recurrent changes either on the bill of resources, their layout arrangement, or their program routines. Subsequently, there is a need for manufacturing lines to be flexible while also balancing quality, productivity and cost. A reconfigurable cell is almost equivalent to a cell with a lot of feasible arrangements of its elements. The number of possible execution flows, even for a static cell configuration, is big. In parallel, the sophistication of modern lines emerges challenges on how intelligent agents, multisensory systems and processing modules can be orchestrated.
Representative examples of sophisticated manufacturing systems are those involving deformable materials. Manipulating flexible materials like foams, cloths and wires requires complex handling strategies which frequently utilize flexible materials modelling frameworks, model-based planners, multi-sensory perception systems, and dexterous robot tools. This implies a large number of modules that need to be orchestrated for achieving the desirable performance, thus the time and resources for the creation, edit, maintenance, and monitoring of schedules can become a weak link for non-rigid assembly systems.
Designing an easy-to-use orchestrator with high parallelization capabilities requires striking an important balance
When designing a tool that orchestrates such complex robotic behaviors it is important to decide the way that execution flows are represented. That representation has to achieve an important balance. The created schedules need to be interpreted by the orchestrator quickly while being easy understood by users. Within MERGING, LMS designed the Deformable Object Handling Controller (DOHC) by combining common scheduling practices of manufacturing systems.
Whenever more parallel executions are possible, DOHC generates new actors to undertake them. DOHC can execute an amount of parallel running branches that is dependent on the hardware capabilities and is not limited by the software architecture.
Schedules are described using a format that can visualize them using Activity on Node (AoN) diagrams. Those are easy for users and engineers to understand, and can be translated rapidly in Activity on Arc (AoA) diagrams, which can be interpreted and executed quickly by the orchestrator.
Additionally, a hierarchical approach is used, which makes it possible for users to describe complex execution flows without resulting in more complex representations for the orchestrator. Although this architecture doesn’t set any limits, for MERGING, five abstraction layers are used, namely: Order, Job, Task, Operation and Action.
Parallelization is achieved with the use of the actor model abstraction. Through a procedure that runs “under the hood”, without requiring any effort by the user, DOHC assigns activities to different actors and handles race conditions, making it possible for the described schedule to be executed in the fastest possible way. Whenever more parallel executions are possible, DOHC generates new actors to undertake them. DOHC can execute an amount of parallel running branches that is dependent on the hardware capabilities and is not limited by the software architecture.
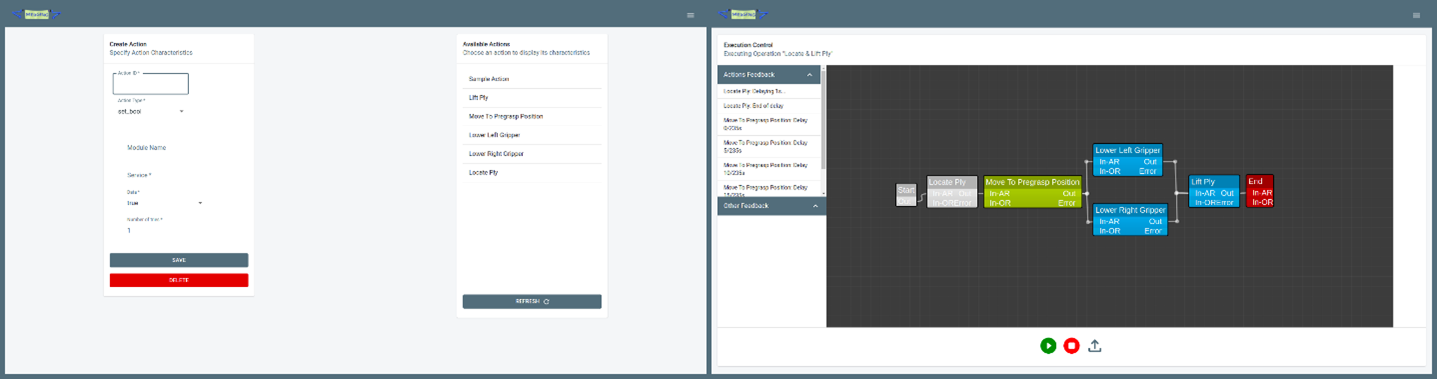
It is evident, that even engineers with advanced programming skills may hesitate to use a tool that requires a tiresome learning process. Users that do not have programming skills have little to no chances of getting to know such technologies, especially when those are limited to a command line interface. Thus, an intuitive user interface is integrated in DOHC with the aim of enabling the use of the tool by users with less programming expertise. The interface allows for using DOHC via a graphical environment where schedules can be formed or maintained by simple “drag and drop” activities or by navigating through intuitive menus.
MERGING deformable object handling controller aids in efficient runtime orchestration, while making it possible to create and test work schedules in simulation environment and easily overcome any identified problems.
MERGING use cases constitute an opportunity to evaluate the developed software in state-of-the-art cells that require complex orchestration strategies. The results of early experimentations are promising, indicating that efficient runtime orchestration can be achieved with the use of DOHC. A significant improvement was also observed during the development phase, where it became possible to quickly create and test work schedules within simulation environment and easily overcome any identified problems.

Konstantinos Kavvathas, Research Engineer, LMS, University of Patras.
Konstantinos Kavvathas works as a research engineer at the “Robots, Automation and Virtual Reality in Manufacturing” group of Laboratory for Manufacturing Systems and Automation (LMS). He has background experience in machine learning, multidimensional data structures and web development. His research activities include the design of software for task planning and orchestration of reconfigurable or hybrid robotic cells through novel software applications.