PRESS RELEASE
01 April 2020
The MERGING collaborative project, involving twelve partners from academia and the industry, will pioneer the use of robotics and Artificial Intelligence for manipulating flexible and fragile objects. The resulting technologies are to be applied to the textile, food and transport industries
A newly-launched European research project will develop and test new technologies to give robots one of the key abilities they still miss: the ability to manipulate soft, flexible and fragile objects.
Current robots are mostly used for industrial applications, where their tasks typically consist -of handling rigid objects such as car parts or electronic components, interacting with them in repetitive operations. On the other hand, a big part of the European and global industry is comprised of sectors where soft and flexible items are manipulated. For example the textile industry, with the fabrication of garments, shoes or lingerie; the food supply chain, that encompasses a wide range of difficult tasks like the processing of meat, canning, packaging or manipulation of food, liquids, fruits, vegetables, and all sort of tasks in retail; the transport sector, involving the manipulation of glass fibre, carbon fibre or other materials for the manufacturing of composite parts for building structures of vehicles. All these materials do not behave in an entirely predictable way, due to their high flexibility, and can be easily damaged. Grasping and manipulating them requires a gentle grasp, fine and adaptive control of movements that is beyond the current state of the art in robotics.
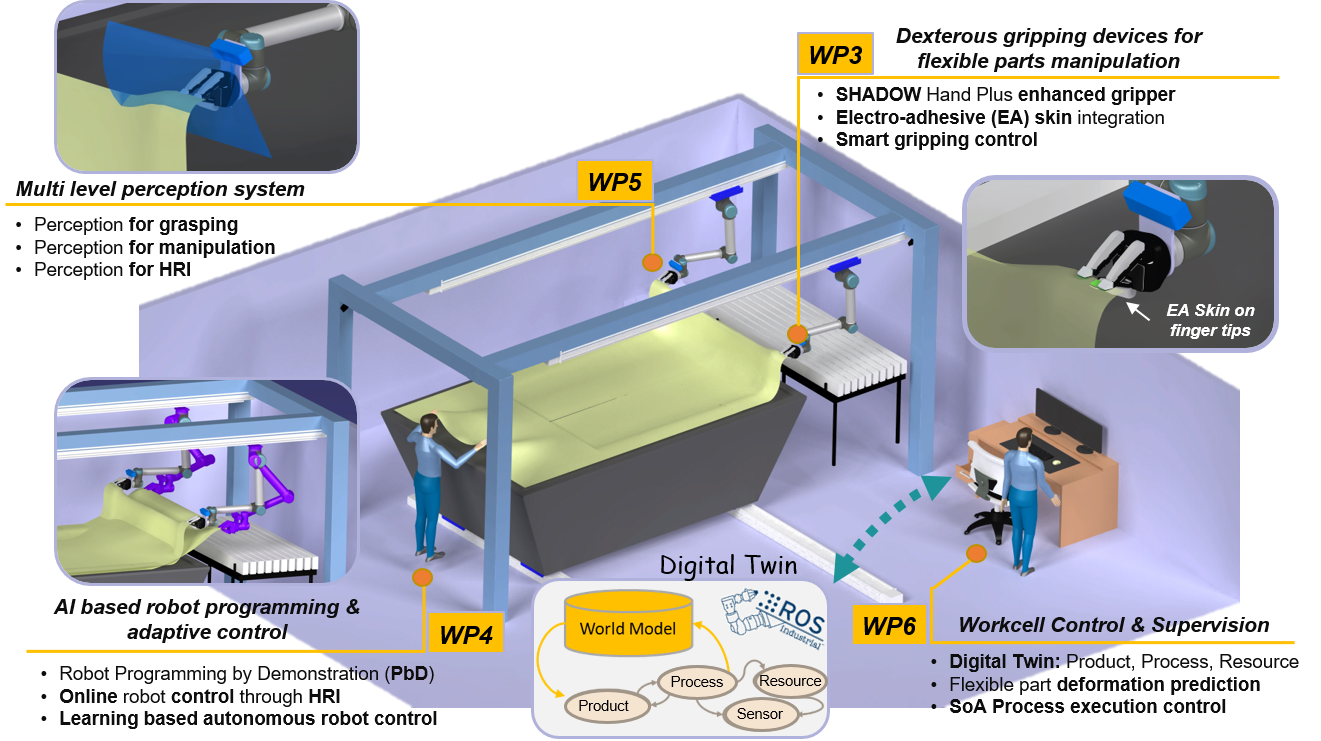
The European project MERGING (Manipulation Enhancement through Robotic Guidance and Intelligent Novel Grippers), that launched in November 2019, aims to design a versatile, low cost and easy-to-use robotic solution that manufacturers can apply to support or automate tasks involving the handling of flexible or fragile objects. It will consist of a new robotic dexterous gripper taking advantage of an integrated adaptive electro-adhesive skin. This skin will induce electrostatic attraction between the gripping surface and the object, thanks to an electric field produced by skin-enclosed electrodes. The skin will also have the ability to conform to the objects to handle to raise the contact surface. Thanks to this skin, the new gripper will show enhanced gripping performances, while reducing the gripping forces, thus avoiding damaging the soft objects. The control of the complete robotic system will include, firstly, perception and supervision functions to adapt the system’s response to the execution conditions and to high variability of the flexible object’s behaviour; secondly, control abilities to make the human-robot or multi-robot co-manipulation of the flexible object safer, using Artificial Intelligence and Machine Learning. Thus, the robot will be able to learn how to handle soft objects without damaging them, as well as how to safely work side by side with humans.
The Merging technology will be tested in three different applications and sectors. The first one is lingerie manufacturing, with the manipulation of fine textile parts during a critical step of the process, the thermoforming process. The second one is food packaging, more specifically the handling of soft plastic pouches. The third one is the transport industry, where robots and humans will collaborate in handling glass-fibre textiles and foam to manufacture composite panels.
MERGING is a three-and-a-half years project coordinated by CEA (Commissariat a l’Energie Atomique et aux Energies Alternatives) in France, and involving academic and industrial partners from five countries: LMS (Greece), EPFL (Switzerland), AIMEN (Spain), SELMARK (Spain), VDL (Netherlands), Thimonnier (France), Shadow Robot (UK and Spain), IPC (France), CASP (Greece), Opteamum (France).